Page Not Found
Page not found. Your pixels are in another canvas.
A list of all the posts and pages found on the site. For you robots out there is an XML version available for digesting as well.
Page not found. Your pixels are in another canvas.
About me
This is a page not in th emain menu
Published:
Quadrotor with mass-spring-damper payload 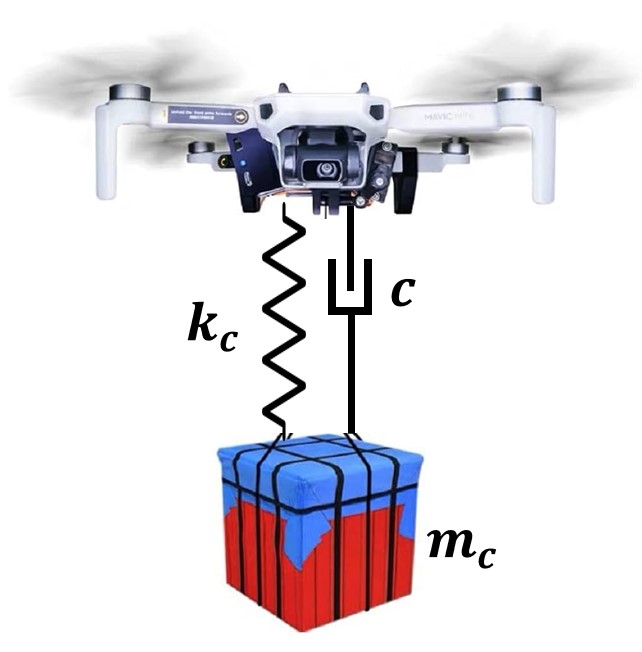
Published:
4-Cart System (mass-spring) 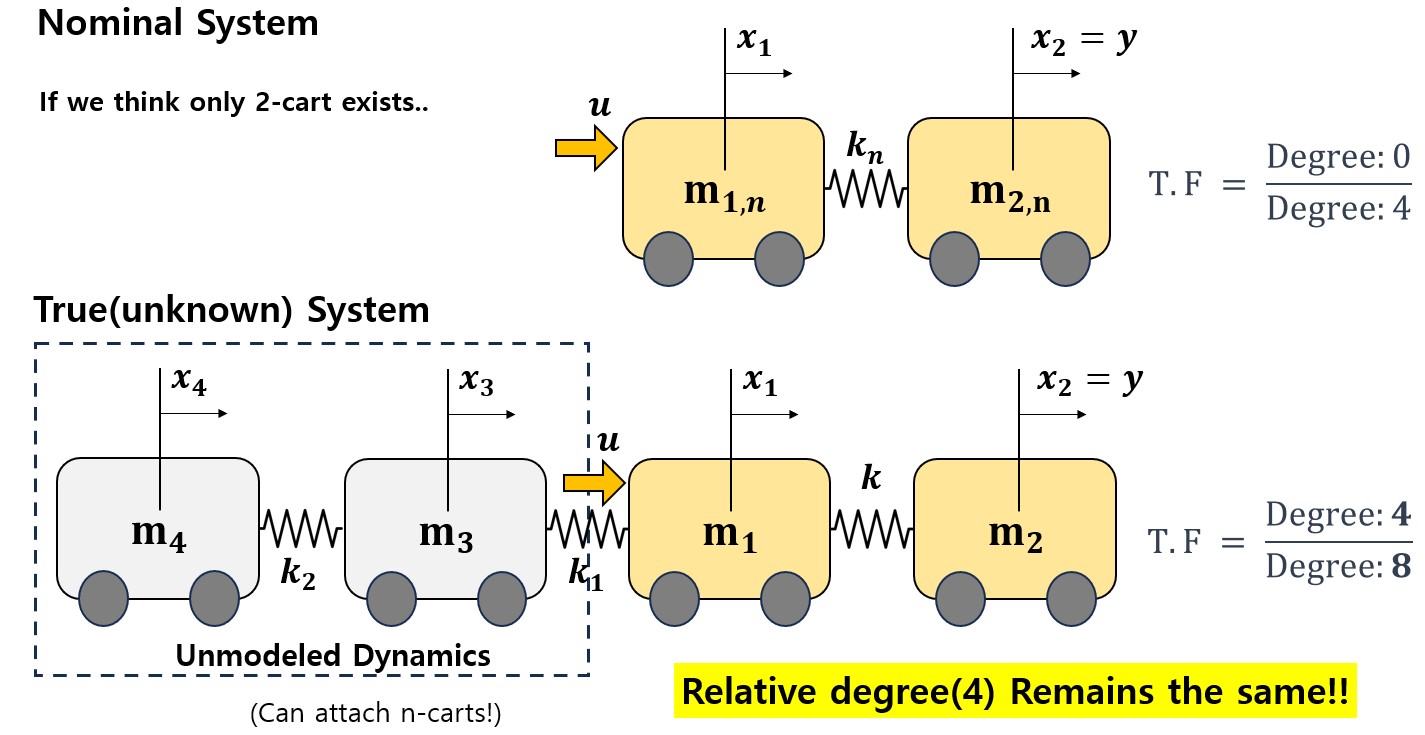
Published:
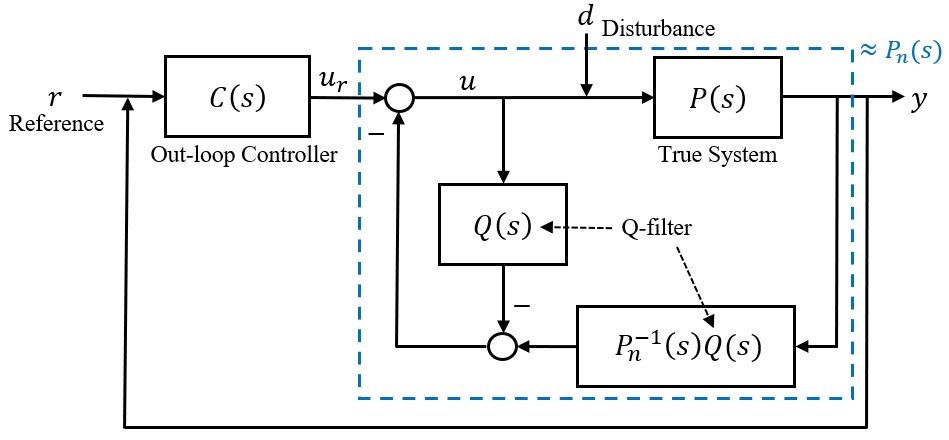
Disturbance Observer Diagram 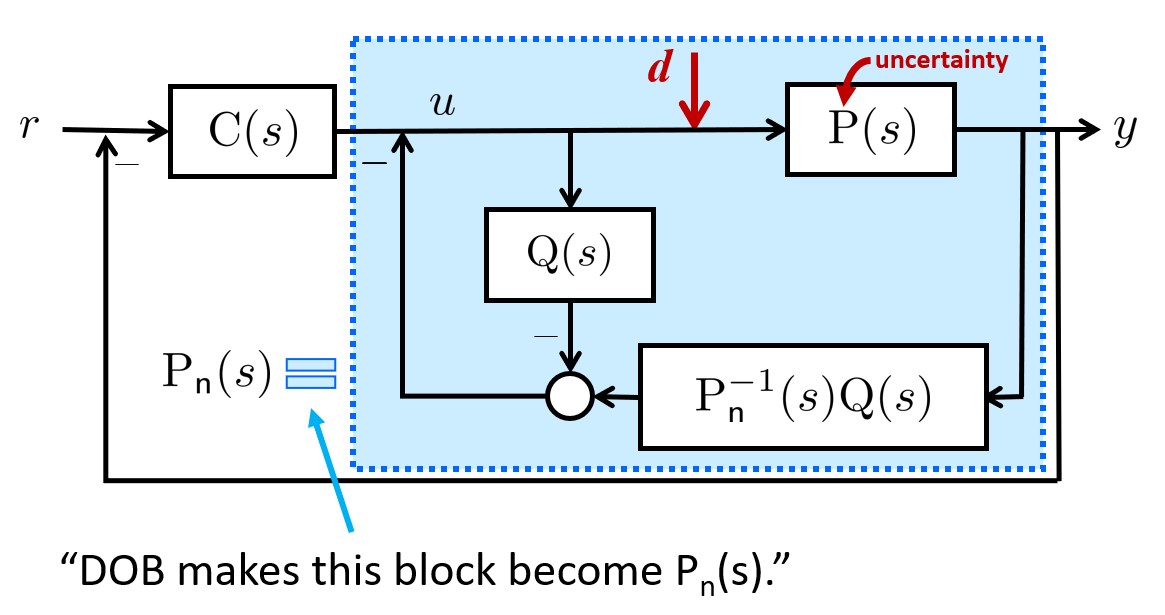
Published:
Hello there! I’m kicking off my blog with this post. My interest lies in studying robust, optimal, and nonlinear control theories, along with their real-world applications. Stay tuned for upcoming posts where I’ll share my insights and knowledge. Wishing you a wonderful day!

Landing algorithm for a glider launched from a mothership at 100m altitude
DOB+MPC for quadrotor dynamics, including unmodeled dynamics
Presented at Institute of Control, Robotics and Systems (ICROS), 2024
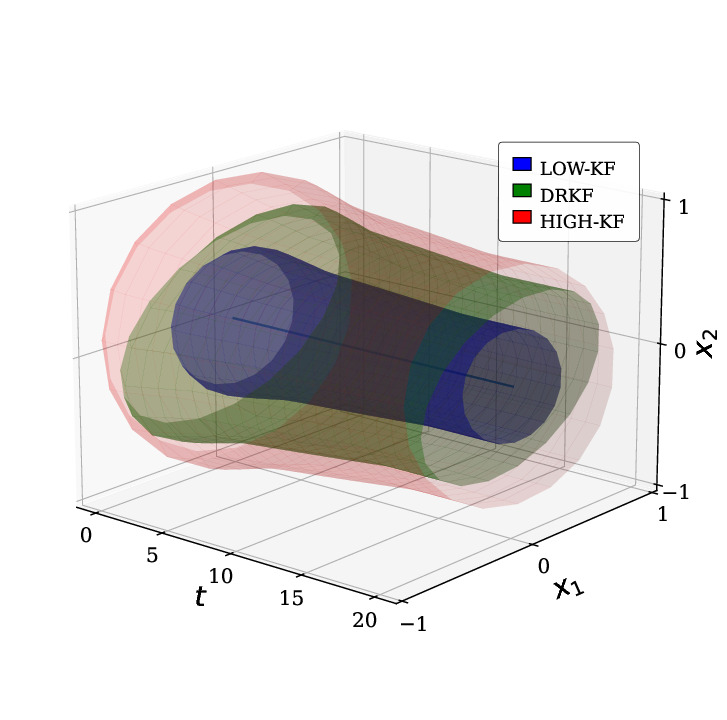
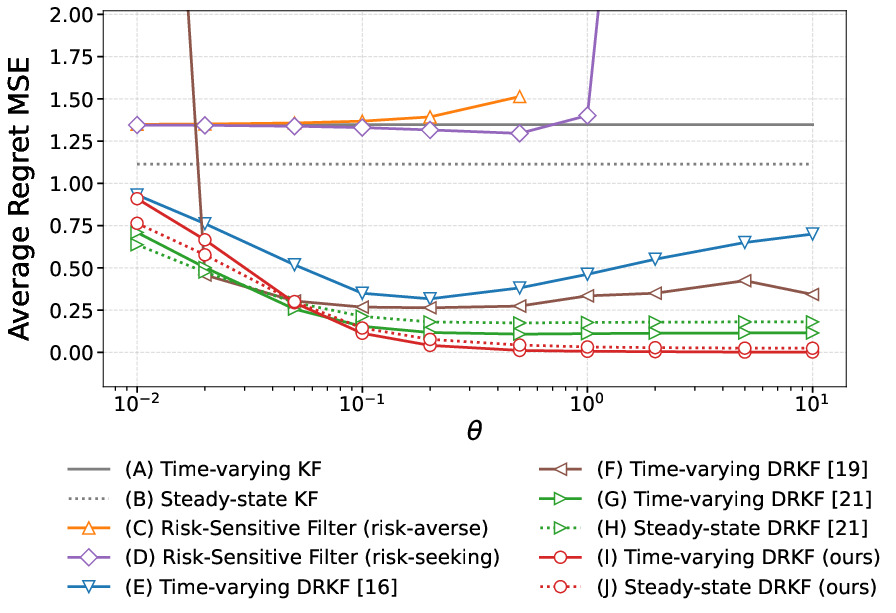
Noise-centric formulation of the Distributionally Robust Kalman filter (DRKF) for discrete-time linear stochastic systems with uncertain noise statistics
Target Tracking under inaccurate data-driven process and measurement noise distributions


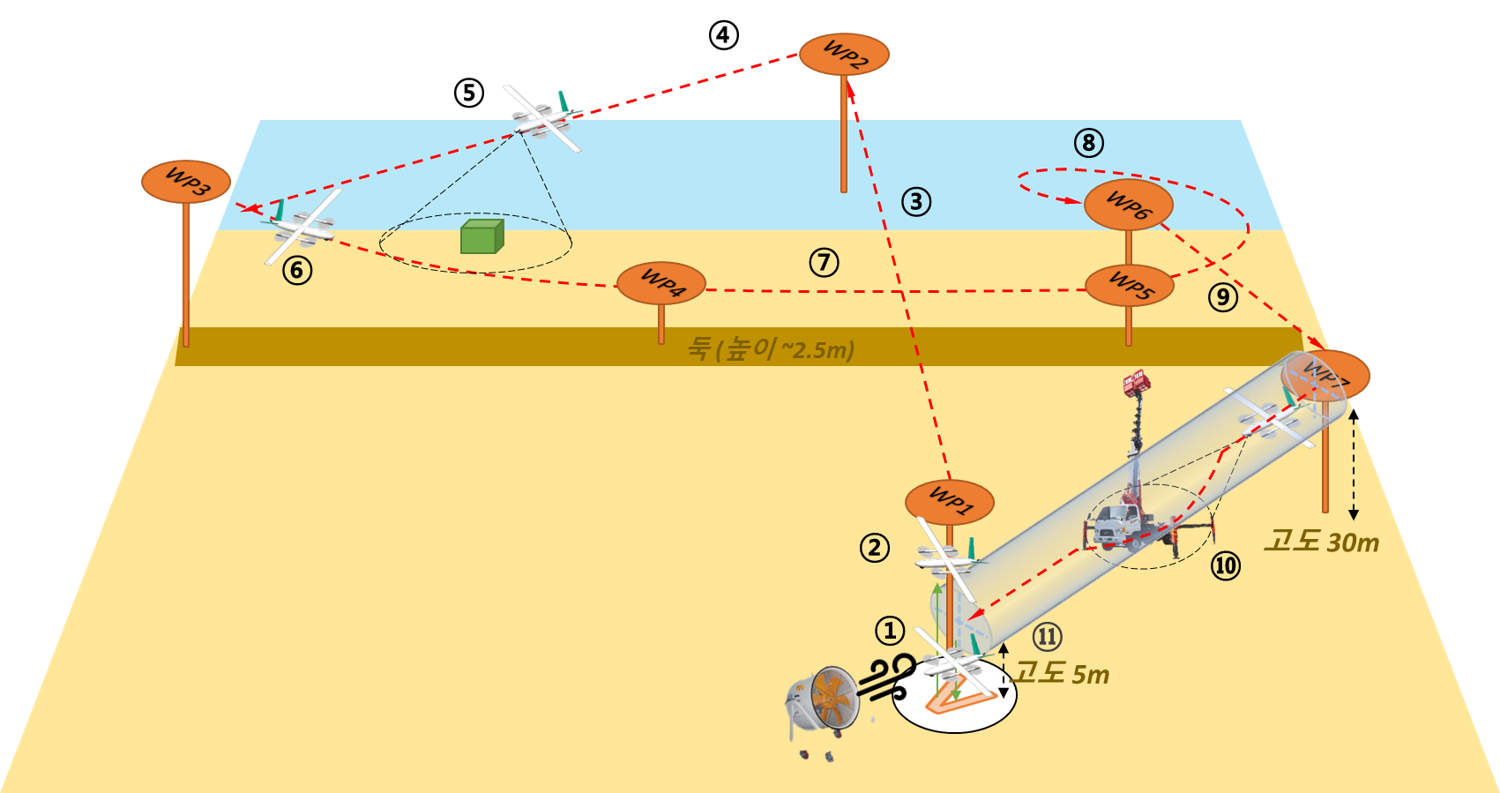

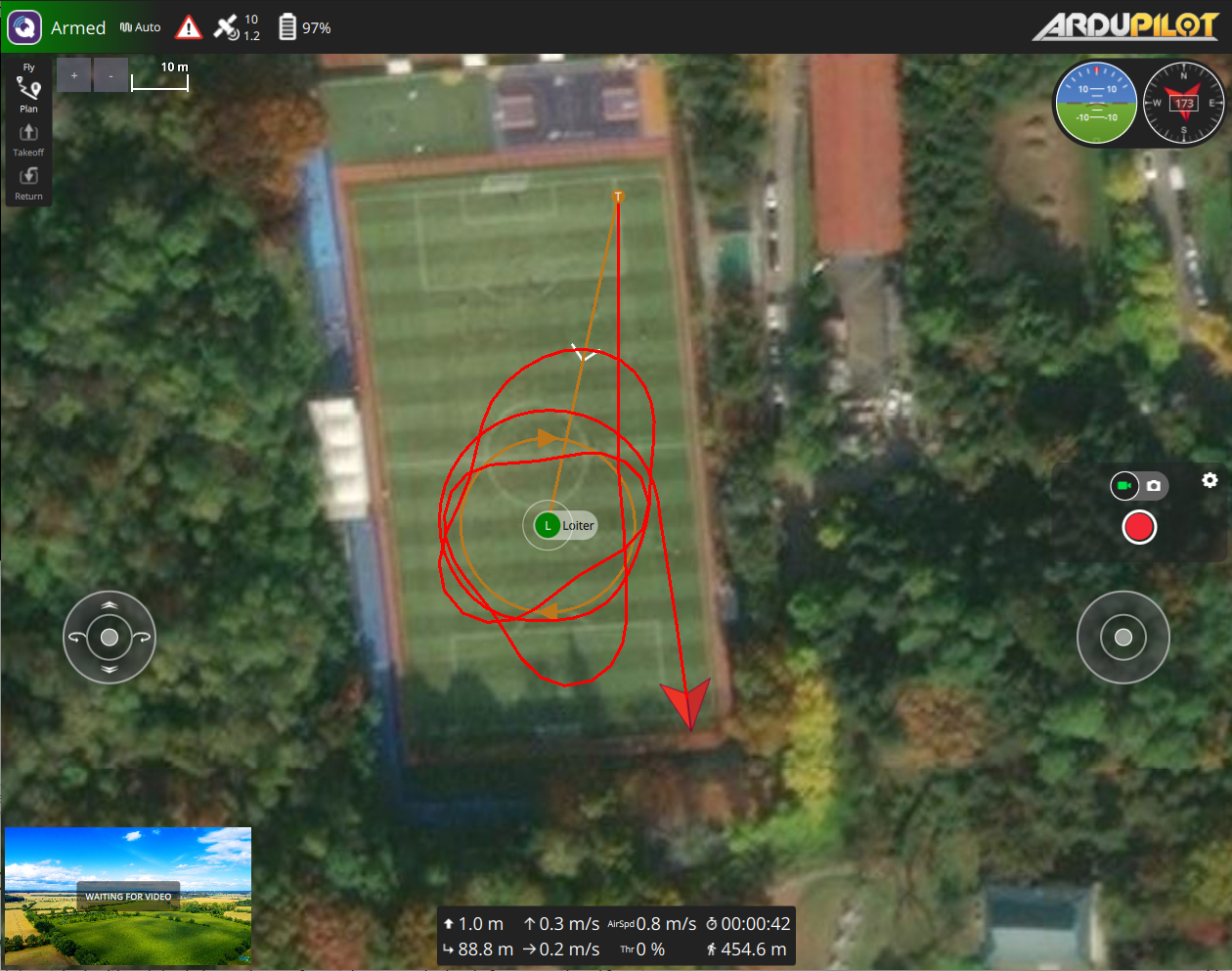
Led a 25-member team to 1st place among 39 university teams. Built a 2.1m-wingspan VTOL with fully autonomous waypoint navigation, transition flight, obstacle avoidance, precision landing, and live streaming.

Origami-Based Length Adjustable Landing Gear
Automated Inverse Temperature Tuning for MPPI Control

Organized and conducted over five Quadrotor Build/Fly seminars, teaching hardware assembly, sensor calibration, Ground Control Station usage, flight experiments, and flight log analysis
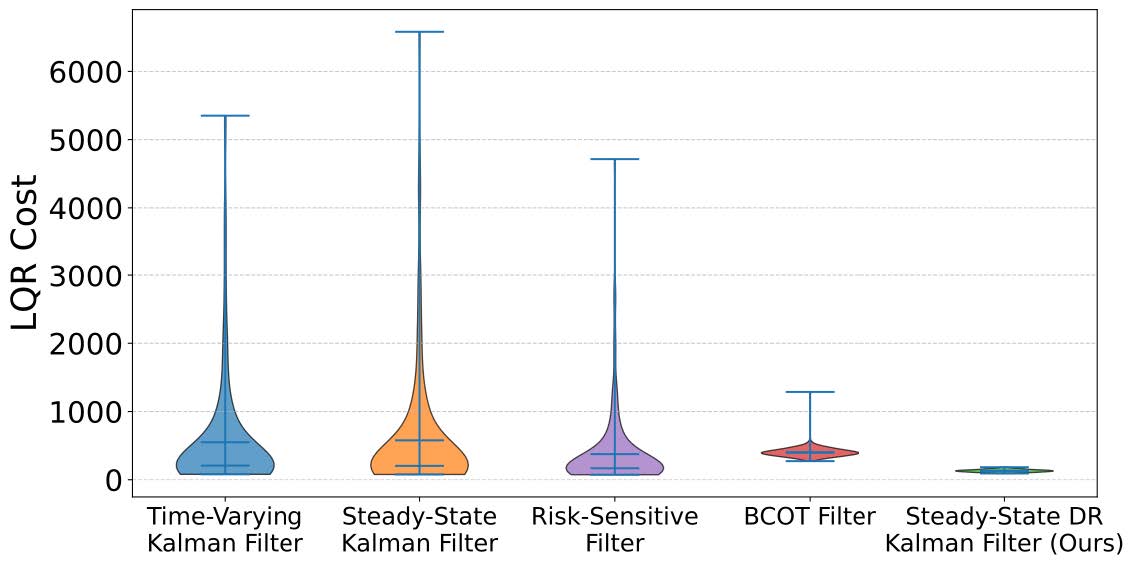
On the Steady-State Distributionally Robust Kalman Filter - IEEE CDC 2025

First VTOL Project

Second VTOL Project
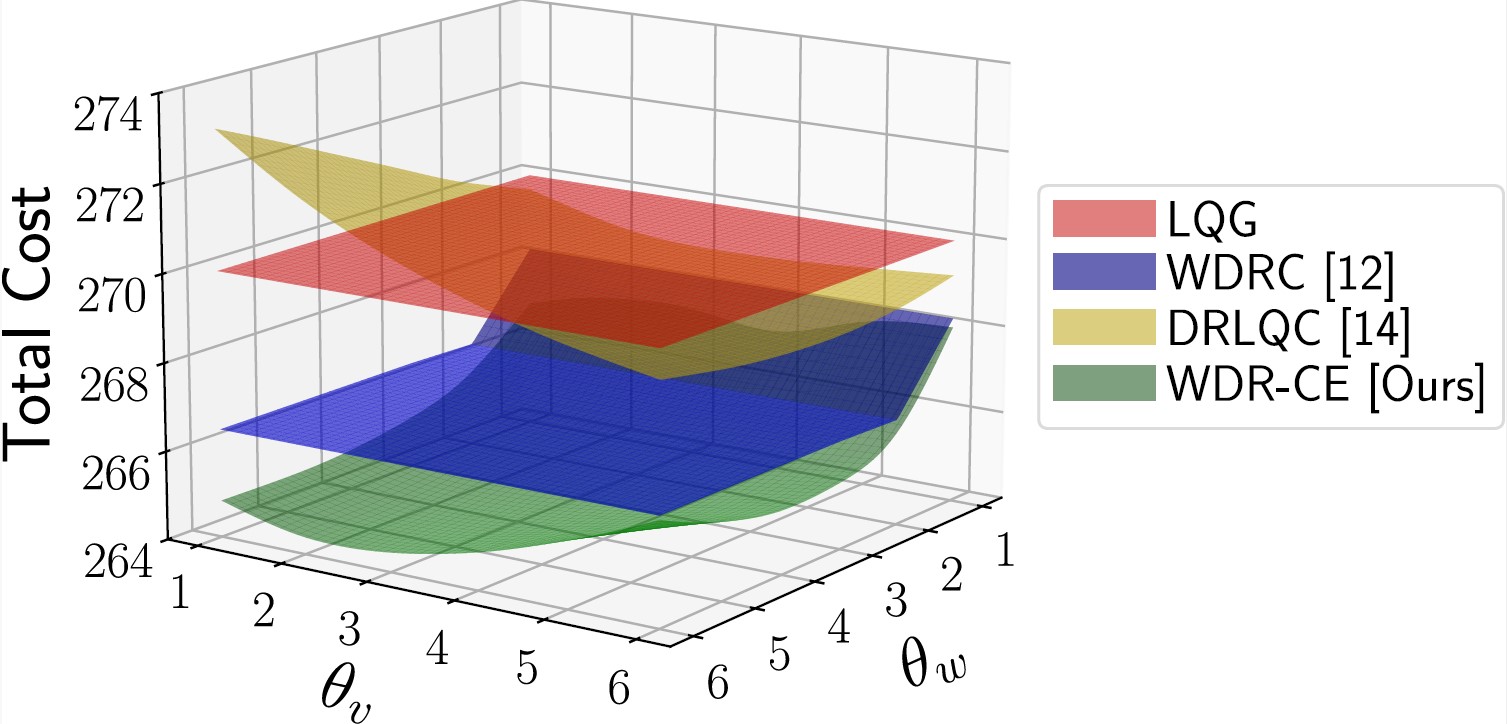
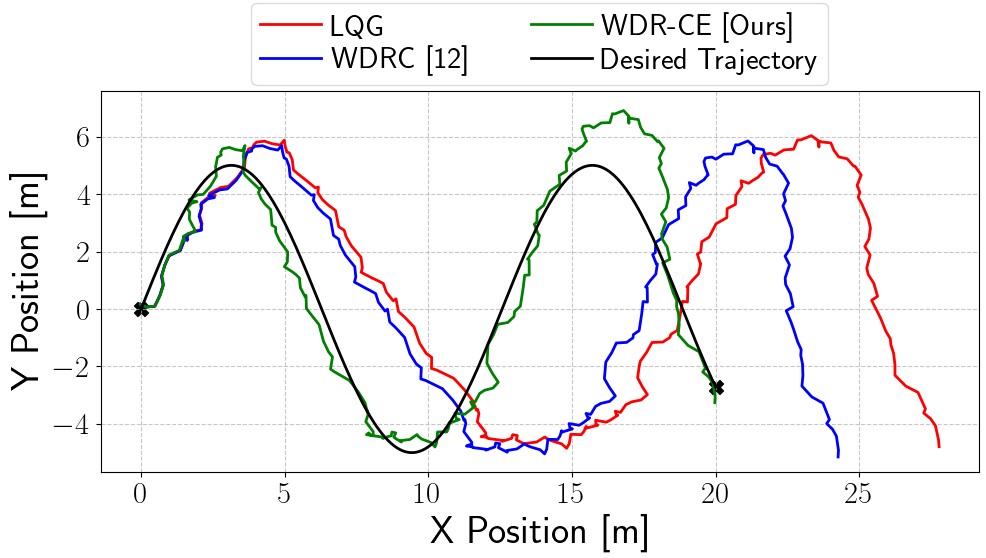
Wasserstein Distributionally Robust Control and State Estimation (WDR-CE)
Published in Advances in Neural Information Processing Systems (NeurIPS), 2024 (submitted), 2024
<!– This paper is about the number 1. The number 2 is left for future work.
Published:
This is a description of your talk, which is a markdown files that can be all markdown-ified like any other post. Yay markdown!
Published:
This is a description of your conference proceedings talk, note the different field in type. You can put anything in this field.
Undergraduate course, University 1, Department, 2014
This is a description of a teaching experience. You can use markdown like any other post.
Workshop, University 1, Department, 2015
This is a description of a teaching experience. You can use markdown like any other post.