Hello, I’m Minhyuk!
I'm a Ph.D. student at UIUC Mechanical Science and Engineering, passionate about all kinds of robotics and learning-based control. I bring an interdisciplinary background in AI and mechanical engineering, grounded in strong mathematics in control theory and hands-on hardware experience that gives me system-level insight. I believe researchers who understand the full system architecture can make the greatest impact! [CV]
🔬 Research Interests
Education

Publications
* Equal contribution
Distributionally Robust EKF: Absorbing Linearization Mismatch via Wasserstein Ambiguity
IEEE Control and Decision Conference (CDC) 2026, under review
arXivDistributionally Robust Kalman Filter
IEEE Transactions on Automatic Control (TAC), under review
arXivOn the Steady-State Distributionally Robust Kalman Filter
IEEE Control and Decision Conference (CDC) 2025
arXivWasserstein Distributionally Robust Control and State Estimation for Partially Observable Linear Systems
arXivStability Analysis of Disturbance Observer under Model Uncertainty with Different System Degrees between True and Nominal Systems
Institute of Control, Robotics and Systems (ICROS), 2024
Projects
Autonomous Obstacle Avoidance on the GEM e4


Obstacle-aware planning and control on a full-scale autonomous vehicle (Polaris GEM e4)
Distributionally Robust Extended Kalman Filter (DR-EKF)
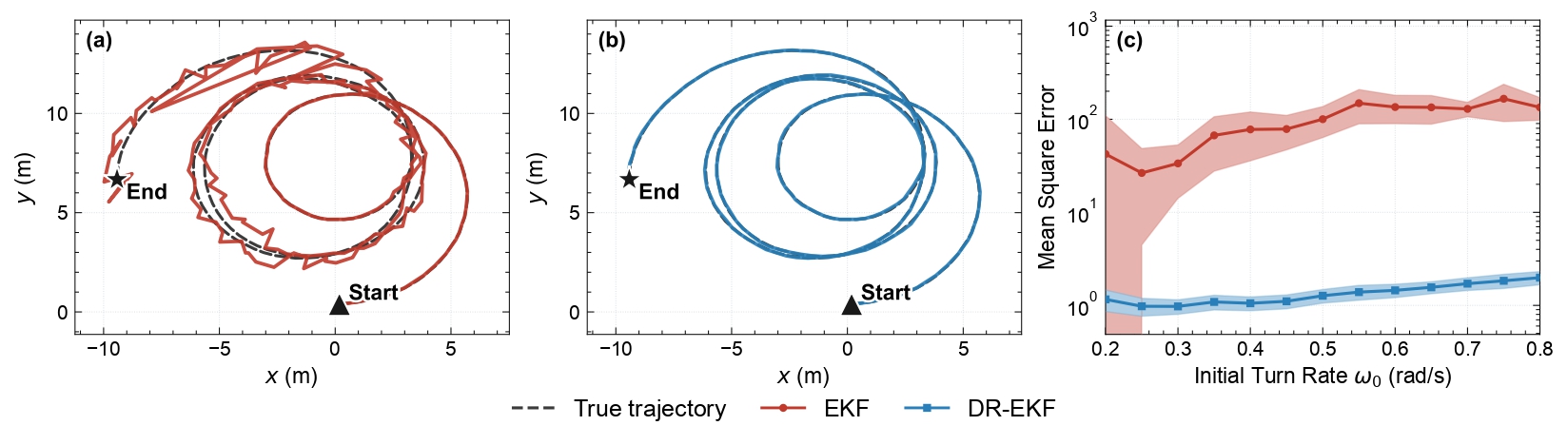
Target Tracking under inaccurate process and measurement noise distributions
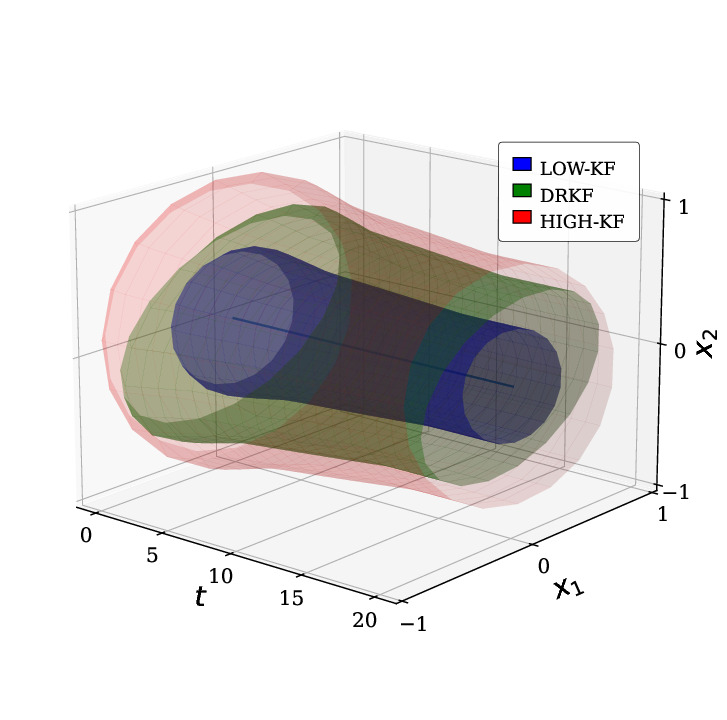
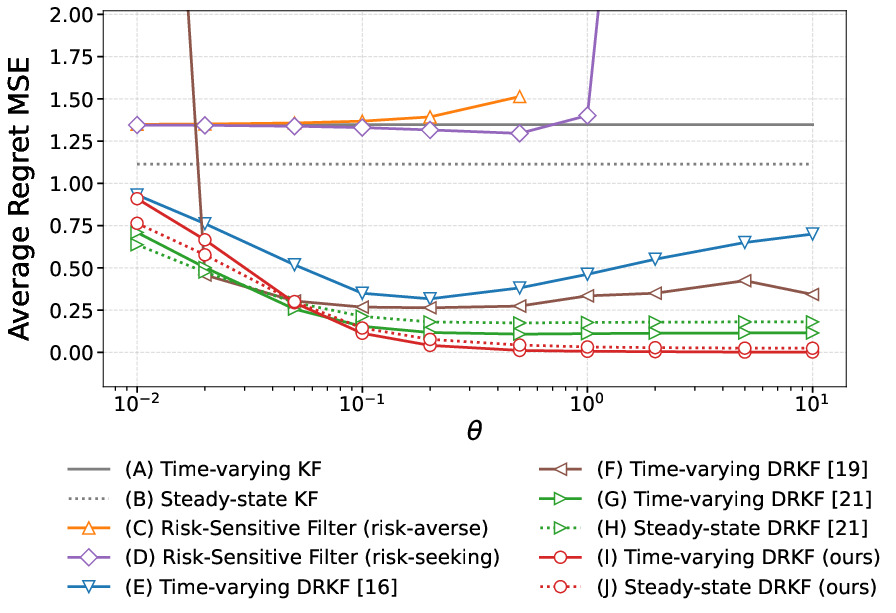
On the Steady-State Distributionally Robust Kalman Filter
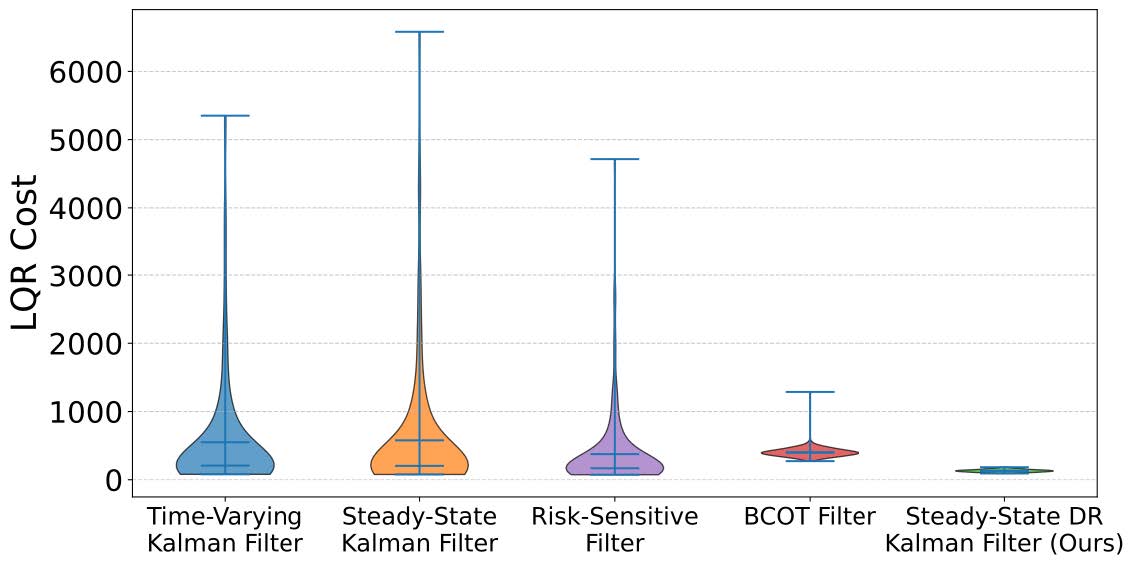
On the Steady-State Distributionally Robust Kalman Filter - IEEE CDC 2025
Distributionally Robust Kalman Filter
Noise-centric formulation of the Distributionally Robust Kalman filter (DRKF) for discrete-time linear stochastic systems with uncertain noise statistics
Wasserstein Distributionally Robust Control and State Estimation for Partially Observable Linear Systems
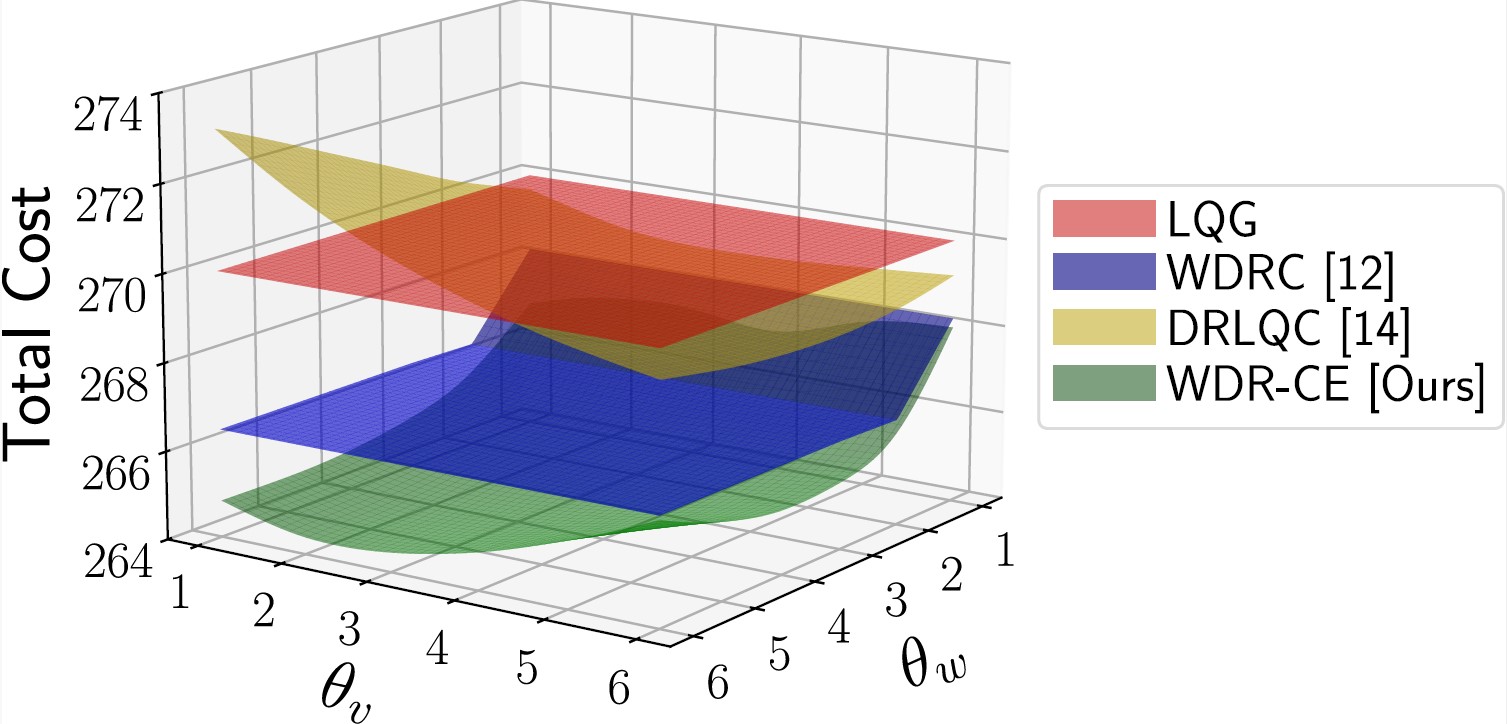
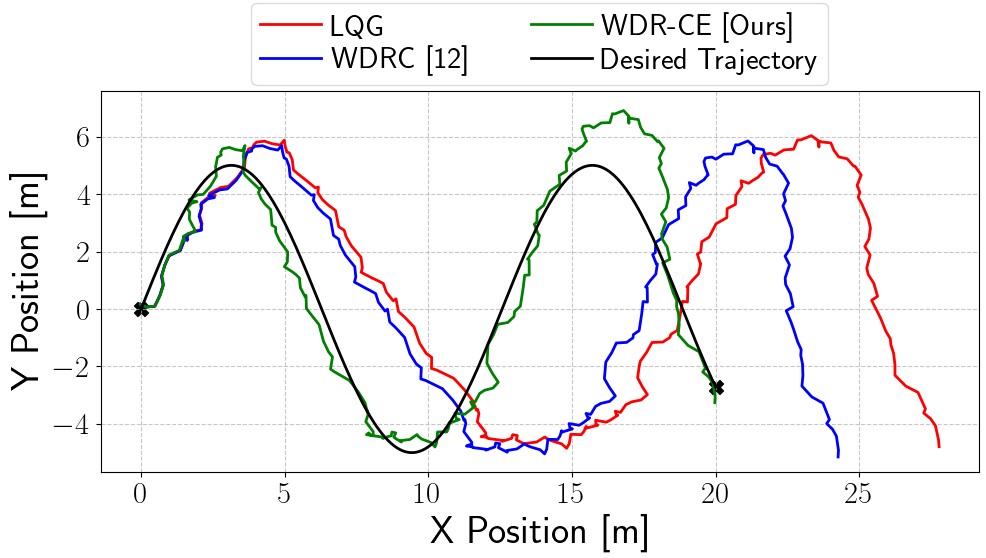
Wasserstein Distributionally Robust Control and State Estimation (WDR-CE)
Automated Inverse Temperature Tuning Algorithm for MPPI Control
Automated Inverse Temperature Tuning for MPPI Control
Stability Analysis of Disturbance Observer under Model Uncertainty with Different System Degrees between True and Nominal Systems
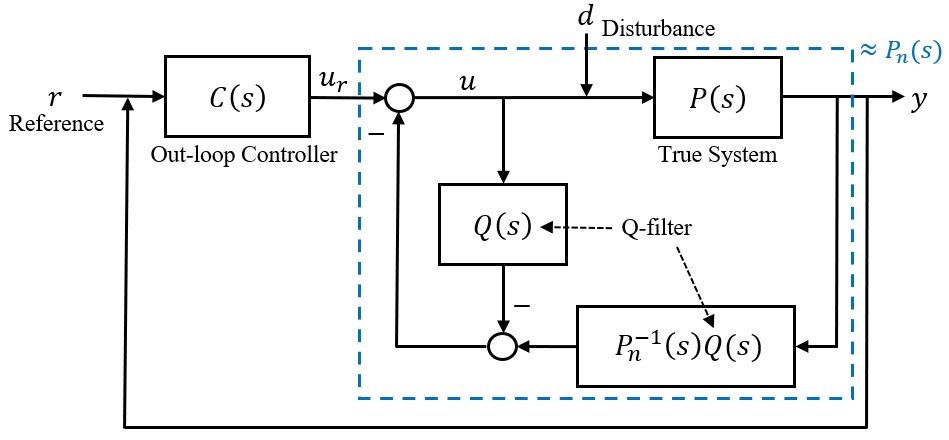
Presented at Institute of Control, Robotics and Systems (ICROS), 2024
Utilizing DOB(Disuturbance Observer) and MPC(Model Predictive Control) on Quadrotor-Delivery application
DOB+MPC for quadrotor dynamics, including unmodeled dynamics
Korea Robot Aircraft Competition - Grand Award


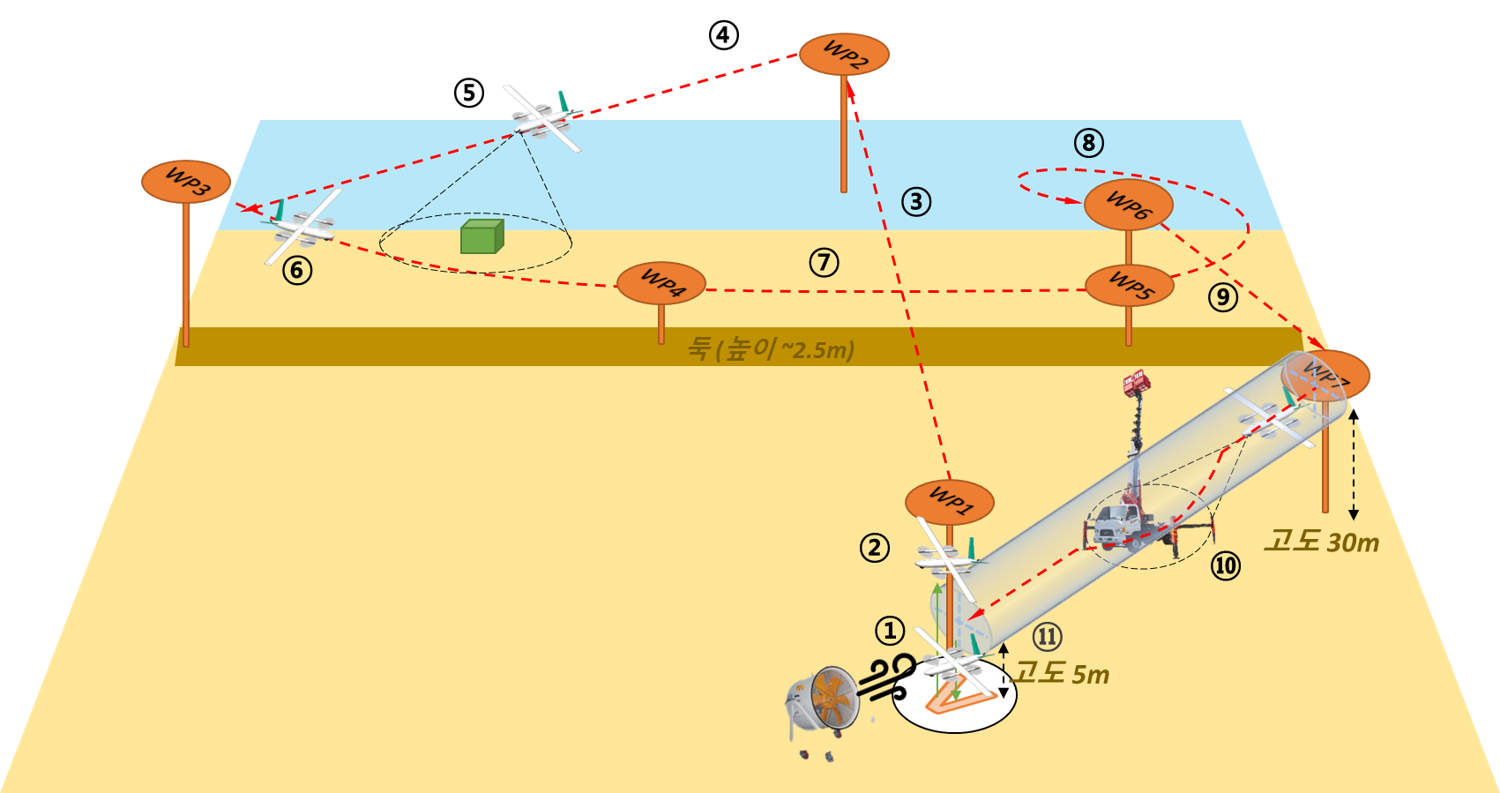

Led a 25-member team to 1st place among 39 university teams. Built a 2.1m-wingspan VTOL with fully autonomous waypoint navigation, transition flight, obstacle avoidance, precision landing, and live streaming.
AIAA Design/Build/Fly Competition

Landing algorithm for a glider launched from a mothership at 100m altitude


Quadrotor Build and Fly Seminar

Organized and conducted over five Quadrotor Build/Fly seminars, teaching hardware assembly, sensor calibration, Ground Control Station usage, flight experiments, and flight log analysis
