VTOL Project (2)
Duration: MAR ‘24 - SEP ‘24
Second VTOL Project for Korea Robot Aircraft Competition
Team Bulnabi at Seoul National University (SNU)
As the team leader of this 25-member project, I have overseen all aspects of the process. Our team has:
- Conducted over 30 fixed-wing flight missions, successfully stabilizing all mission phases.
- Built, redesigned, and rebuilt the entire aircraft over five times to optimize performance.
- Enabled autonomous waypoint missions, implemented obstacle avoidance systems and precision landing.




Multicopter phase - Takeoff

- Takeoff mode
Transition phase
Specification
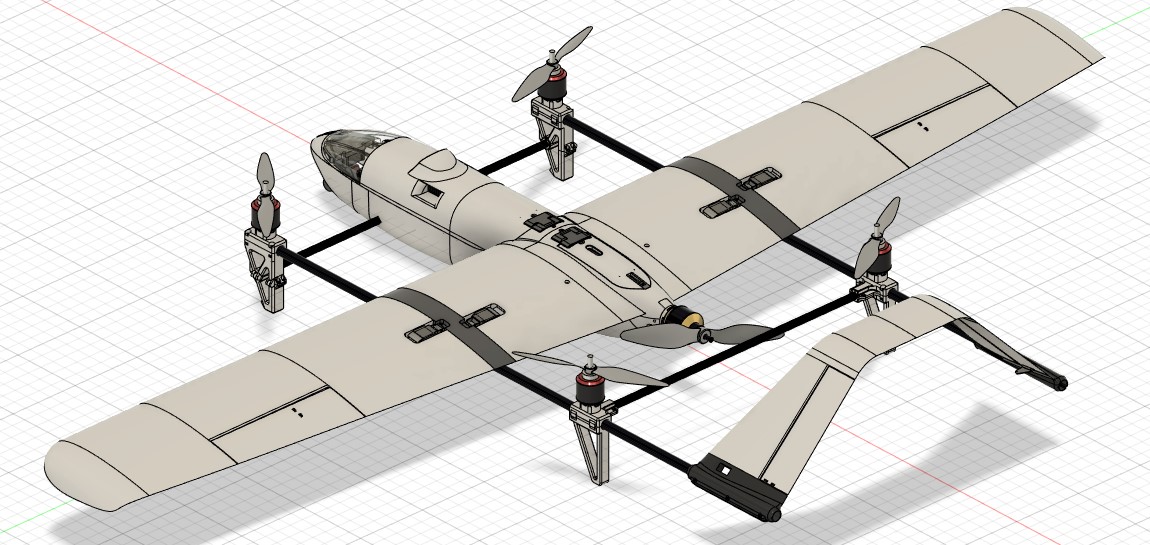
- All parts are handmade & 3D-printed (Using Light-weight PLA)
- A-tailed Standard VTOL with 4 lift motors and 1 pusher motor
- Propeller : 12 X 4.5 (Lift) & 14 X 10 (Pusher)
- Battery : 6S, 10,000 mAh
- GPS RTK
- Companion Computer : NVIDIA Jetson Xavier NX
- Camera : SIYI A8 mini Gimbal Camera 4K
- Wingspan : 2011 mm
- Cruise speed : 18 m/s
- Stall speed : 13 m/s
- Weight : 6.2 kg
- Flight Controller : Pixhawk 6X
- Firmware : PX4-Autopilot v1.15.0-beta2