Distributionally Robust Extended Kalman Filter (DR-EKF)
Target Tracking under inaccurate data-driven process and measurement noise distributions
Target Tracking under inaccurate data-driven process and measurement noise distributions
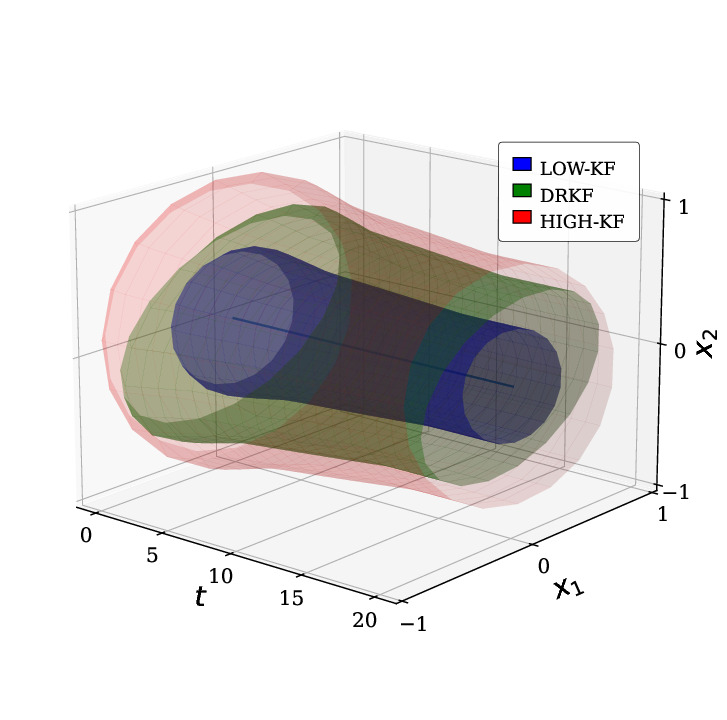
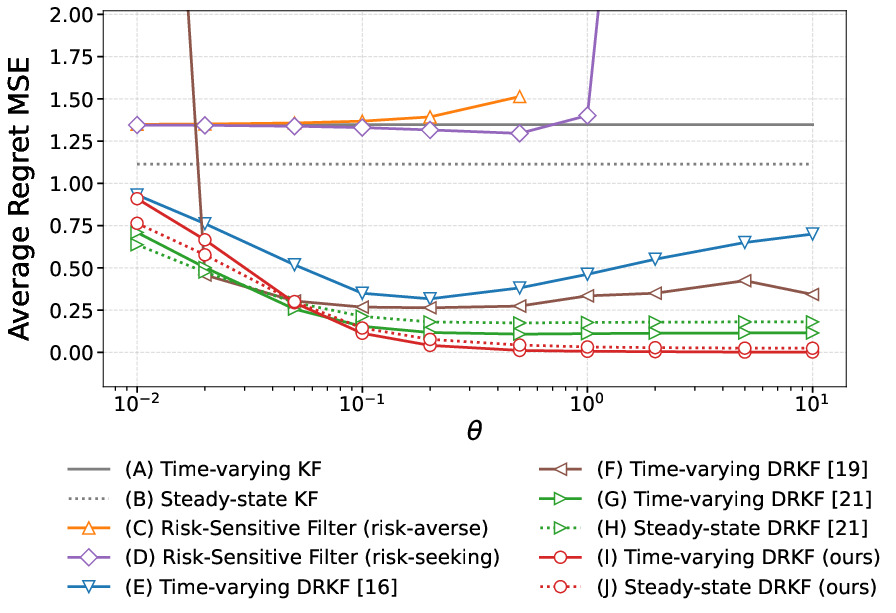
Noise-centric formulation of the Distributionally Robust Kalman filter (DRKF) for discrete-time linear stochastic systems with uncertain noise statistics
On the Steady-State Distributionally Robust Kalman Filter - IEEE CDC 2025
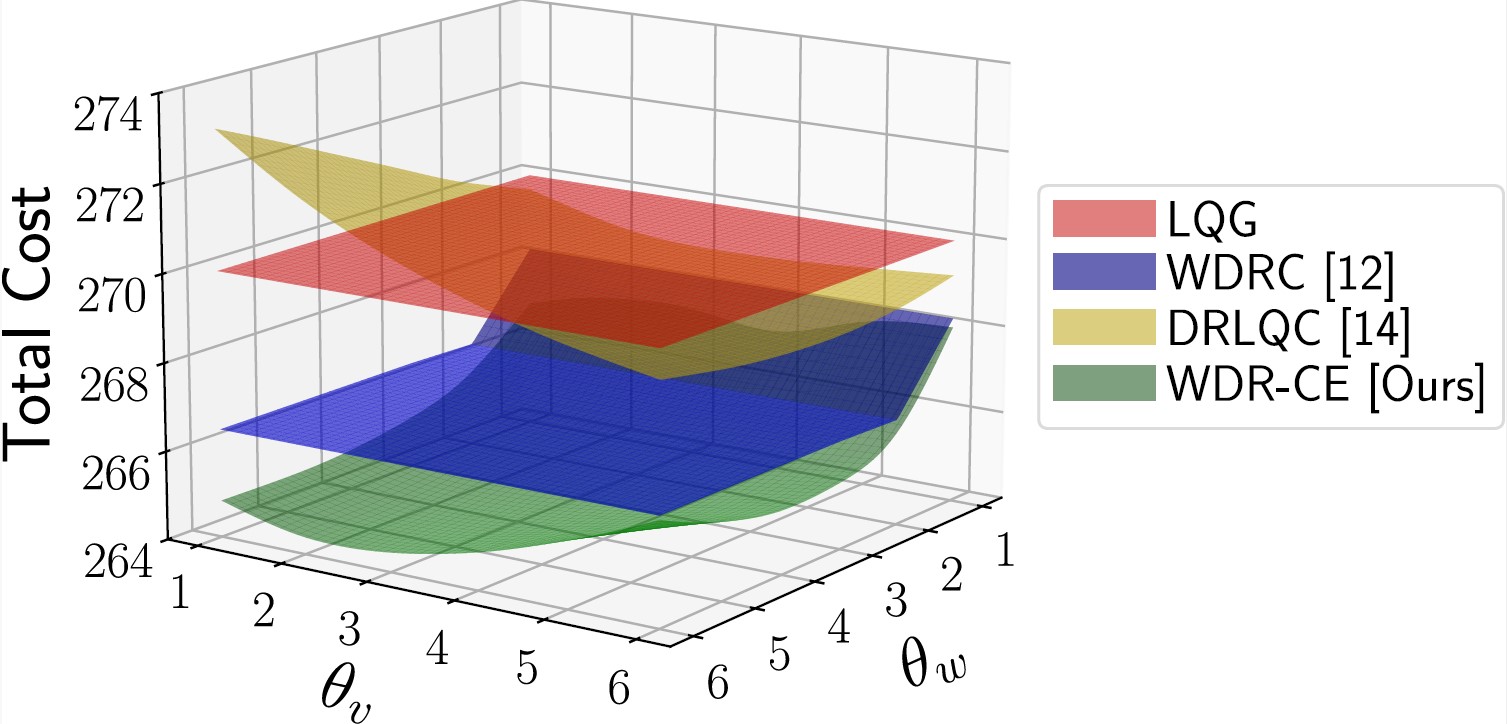
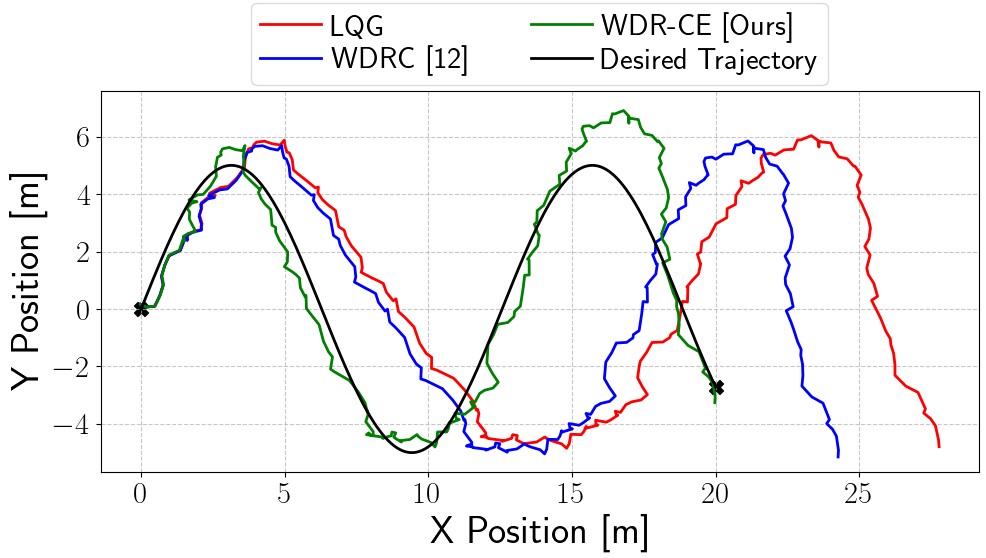
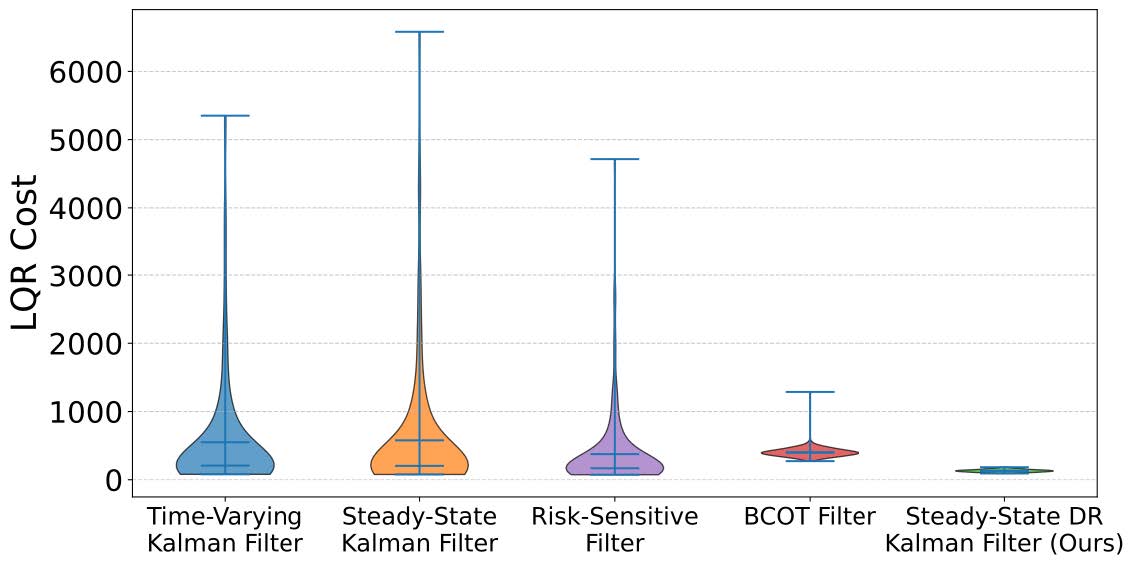
Wasserstein Distributionally Robust Control and State Estimation (WDR-CE)
Automated Inverse Temperature Tuning for MPPI Control
Presented at Institute of Control, Robotics and Systems (ICROS), 2024
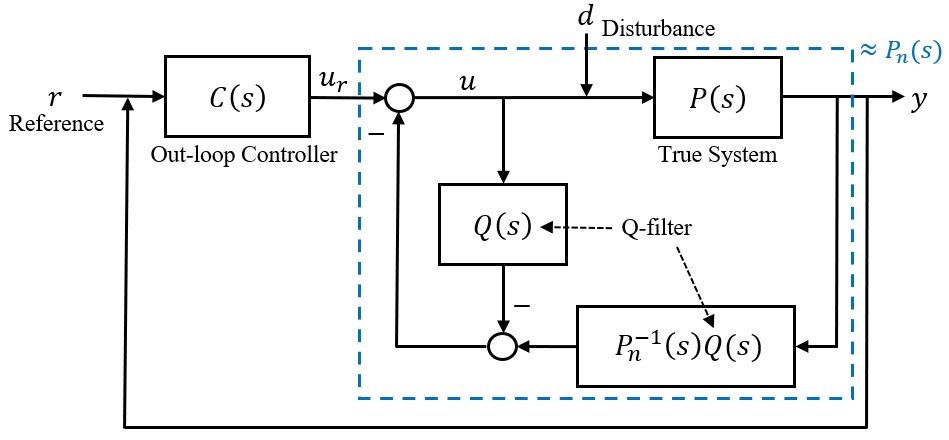
DOB+MPC for quadrotor dynamics, including unmodeled dynamics


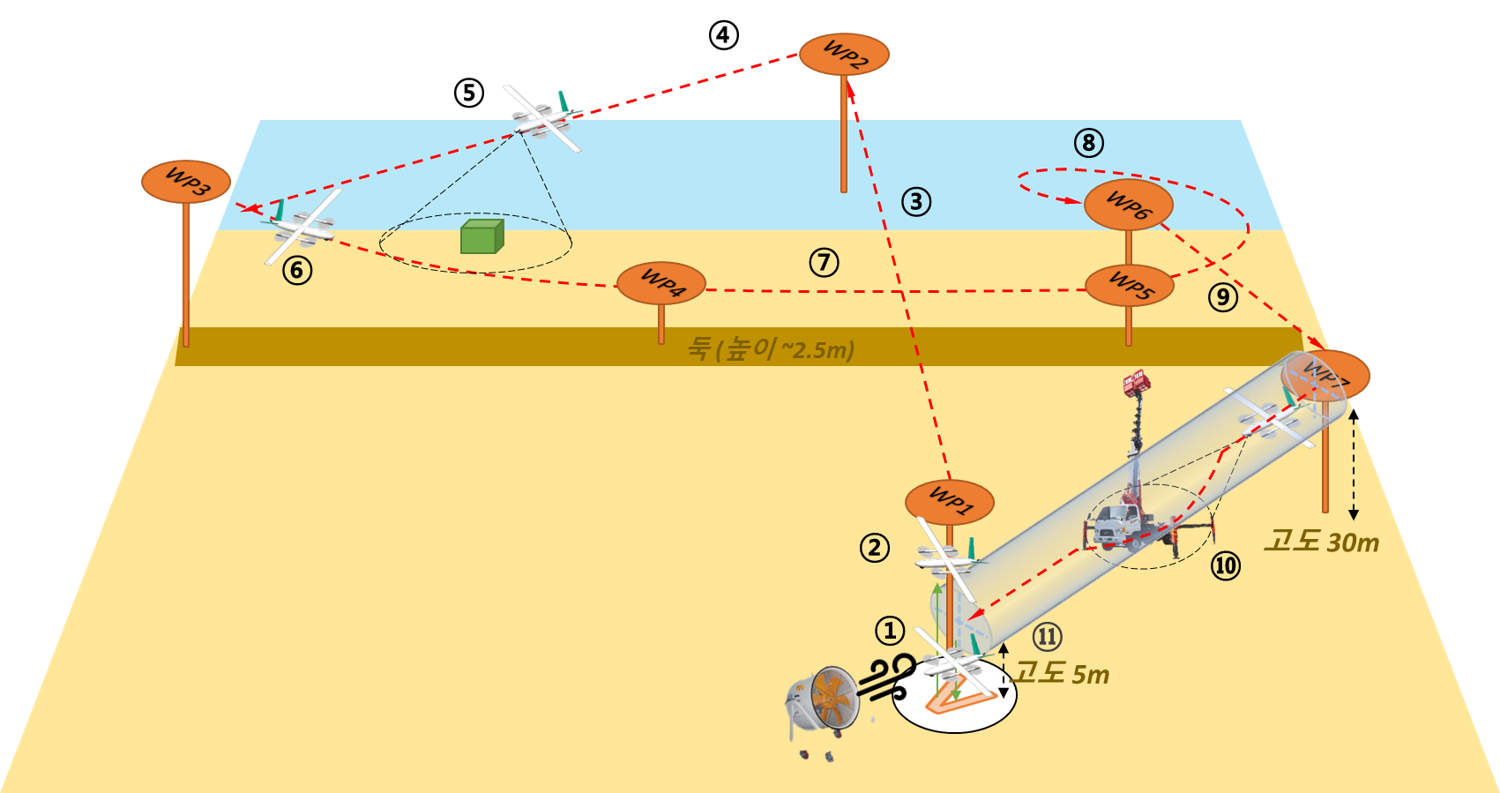

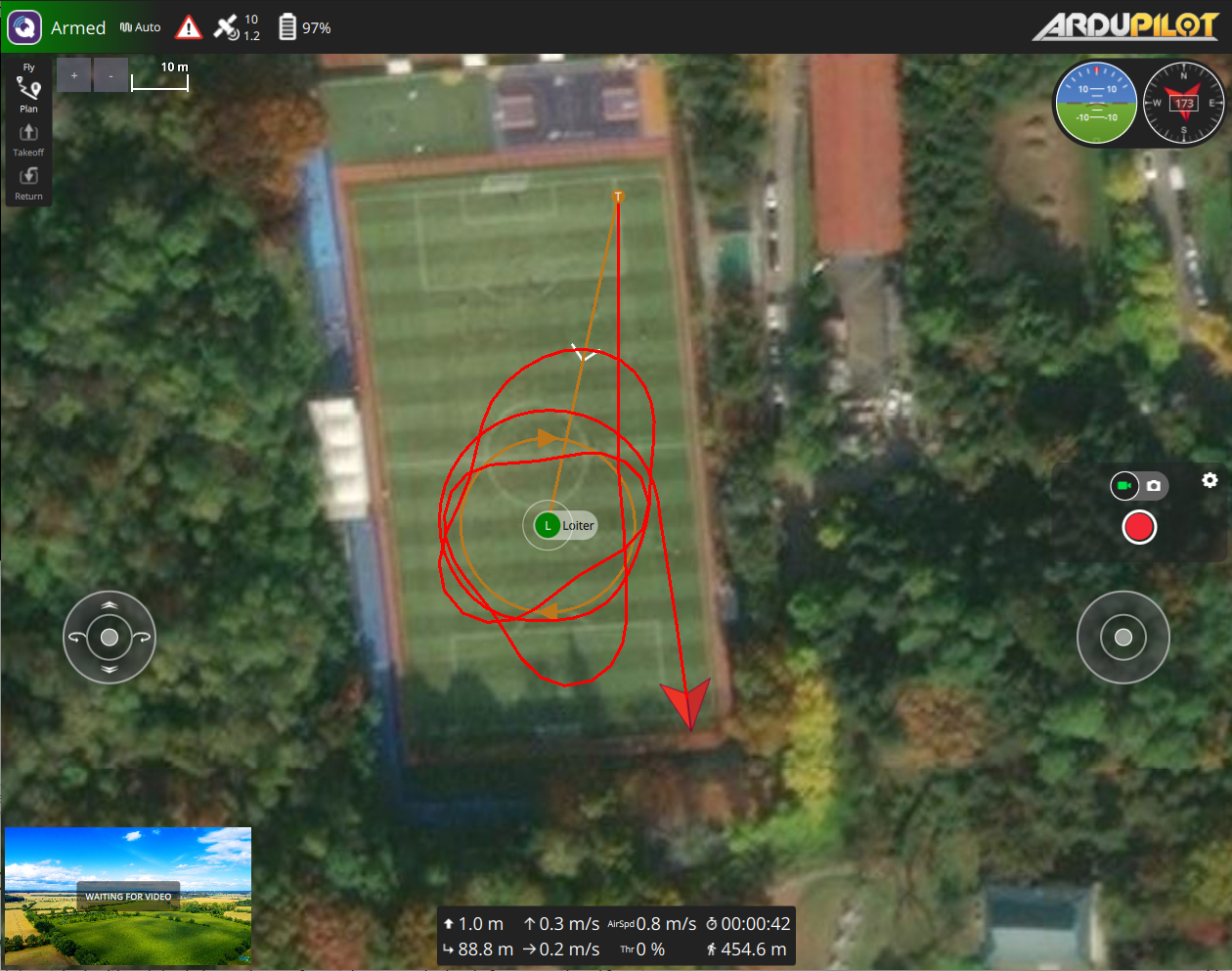
Led a 25-member team to 1st place among 39 university teams. Built a 2.1m-wingspan VTOL with fully autonomous waypoint navigation, transition flight, obstacle avoidance, precision landing, and live streaming.

Landing algorithm for a glider launched from a mothership at 100m altitude

Second VTOL Project

First VTOL Project

Organized and conducted over five Quadrotor Build/Fly seminars, teaching hardware assembly, sensor calibration, Ground Control Station usage, flight experiments, and flight log analysis

Origami-Based Length Adjustable Landing Gear